 شاهین آقامعلی
شاهین آقامعلی
رباتهای پرنده کوچک یا همان میکرو رباتهای الهامگرفته از حشرات میتوانند در آینده نقش مهمی در عملیاتهای نجات ایفا کنند؛ بهویژه در شرایطی مانند زلزلههای شدید که رسیدن به افراد زیر آوار برای رباتها و انسانهای عادی بسیار دشوار است. این میکرو رباتها قادرند مانند حشرات واقعی وارد شکافهای تنگ شده و موانع را دور بزنند. اما بزرگترین چالش آنها تاکنون دستیابی به سرعت، چابکی و مانورپذیری مشابه حشرات واقعی بود.
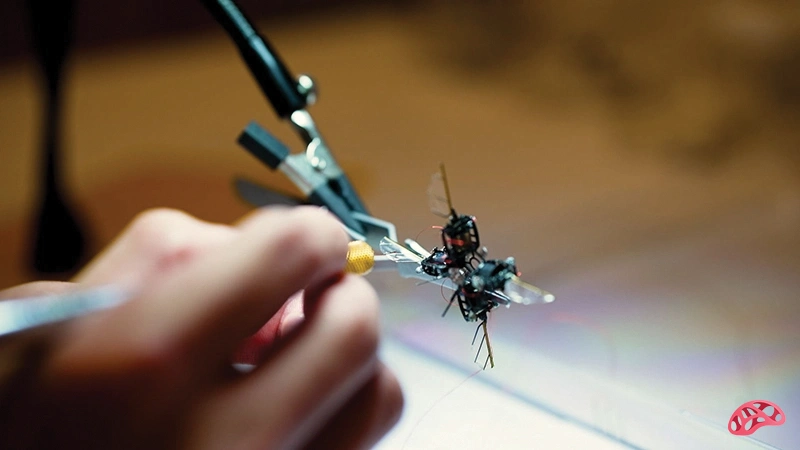
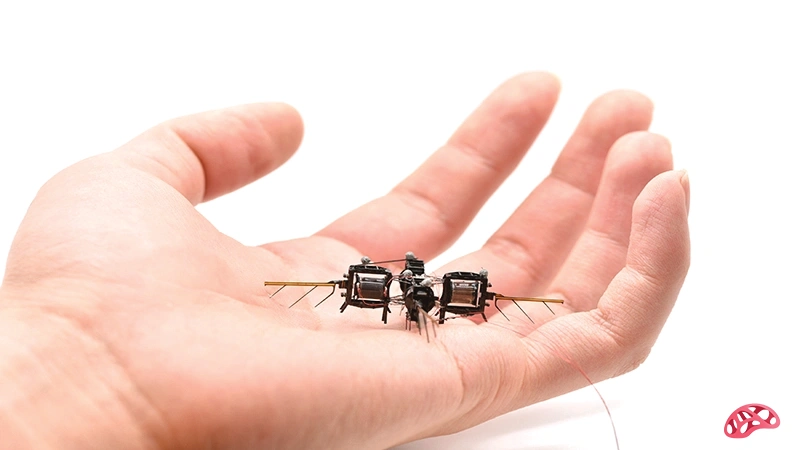
اکنون تیمی از پژوهشگران MIT موفق شدهاند محدودیتهای قبلی را پشت سر بگذارند و نسل جدیدی از میکرو رباتهای پرنده را معرفی کنند که با کمک یک کنترلر هوش مصنوعی پیشرفته میتوانند با سرعت و چابکی بیسابقهای پرواز کنند؛ تا حدی که حرکاتی مانند ۱۰ سالتوی پیاپی در ۱۱ ثانیه را نیز انجام میدهند. این ربات کوچک که اندازهای مشابه یک نوار کاست و وزنی کمتر از یک گیره کاغذ دارد، از ماهیچههای مصنوعی نرم برای به حرکت درآوردن بالهای سریع خود استفاده میکند. این ویژگی باعث شده که حرکت آن بسیار شبیه حشرات باشد. اما عملکرد واقعی و پرواز دقیق آن زمانی ممکن شد که تیم MIT یک کنترلر مبتنی بر هوش مصنوعی را جایگزین تنظیمات دستی قبلی کرد.
کنترلرهای قبلی که بهصورت دستی تنظیم میشدند، عملکرد ربات را محدود کرده بودند؛ زیرا نمیتوانستند در شرایط پیچیده، عدمقطعیتهای پروازی و محاسبات سنگین دینامیکی را مدیریت کنند. برای حل این مشکل، دو تیم تحقیقاتی MIT – یکی به رهبری کوین چن و دیگری به رهبری جاناتان هاو – یک چارچوب کنترلی دو مرحلهای مبتنی بر هوش مصنوعی طراحی کردند. این سیستم جدید هم قدرت محاسباتی بالایی دارد و هم به اندازه کافی سریع و کارآمد است تا در زمان واقعی روی ربات عمل کند.
مرحله اول: کنترلر مدلپیشبین (Model Predictive Controller)
در این مرحله، پژوهشگران یک مدل ریاضی پویا ساختند که میتواند حرکات آینده ربات را پیشبینی کرده و بهترین مسیر و مانور ممکن را انتخاب کند. این کنترلر قادر است حرکات بسیار پیچیدهای مانند سالتوهای سریع، تغییر جهتهای ناگهانی و شیبگیری شدید را برنامهریزی کند. همچنین محدودیتهای فیزیکی ربات مانند میزان نیرو یا گشتاور بالها را در نظر میگیرد تا از برخورد جلوگیری شود.
مرحله دوم: سیاست هوش مصنوعی (AI Policy) بر پایه یادگیری تقلیدی
چون کنترلر قدرتمند مدلپیشبین برای اجرای زنده بسیار سنگین و کند است، محققان از روش یادگیری تقلیدی (Imitation Learning) استفاده کردند. در این روش، کنترلر پیچیده بهعنوان مربی عمل کرده و به یک مدل یادگیری عمیق آموزش میدهد تا همان عملکرد را با مصرف محاسباتی بسیار کم انجام دهد. نتیجه این کار یک الگوریتم هوش مصنوعی سبک، سریع و دقیق است که میتواند بهطور آنی به تغییرات محیط واکنش نشان دهد.
عملکرد شگفتانگیز ربات
ترکیب این دو مرحله باعث شده که ربات MIT:
• ۴۴۷ درصد افزایش سرعت پرواز داشته باشد
• ۲۵۵ درصد افزایش شتاب تجربه کند
• در جریان بادهای شدید از مسیر خود تنها ۴ تا ۵ سانتیمتر منحرف شود
• ۱۰ سالتوی پیاپی را بدون خطا انجام دهد
این سطح از چابکی پیشتر فقط در حشرات واقعی دیده میشد.
پژوهشگران همچنین توانستند نوعی حرکت پیچیده به نام ساکاد (Saccade) را تقلید کنند؛ مانوری که در آن حشرات با تغییر سریع زاویه، خود را به نقطهای دقیق میرسانند و سپس با یک تغییر زاویه دیگر توقف میکنند. این حرکت برای جهتیابی و دید واضح حشرات ضروری است و انجام آن توسط ربات نشاندهنده پیشرفتی بزرگ در رباتیک زیستالهام است.
آینده میکرو رباتهای AI
تیم MIT قصد دارد در آینده دوربینها و حسگرهای مستقل را به این ربات اضافه کند تا بدون نیاز به سیستمهای خارجی بتواند در محیطهای واقعی پرواز کند. استفاده از حسگرهای پیشرفته همچنین امکان جلوگیری از برخورد رباتها با یکدیگر یا ایجاد حرکت گروهی (Swarm Robotics) را فراهم خواهد کرد. این دستاورد که در نشریه Science Advances منتشر شده، میتواند نقطه عطفی برای رباتیک پروازی، عملیات نجات، نظارت محیطی و حتی کاربردهای نظامی باشد و استانداردهای جدیدی برای رباتهای حشرهای الهامگرفته از طبیعت ایجاد کند.
منبع خبر: news.mit



پاسخ :